How It Works?
Matching Buildings Across Datasets
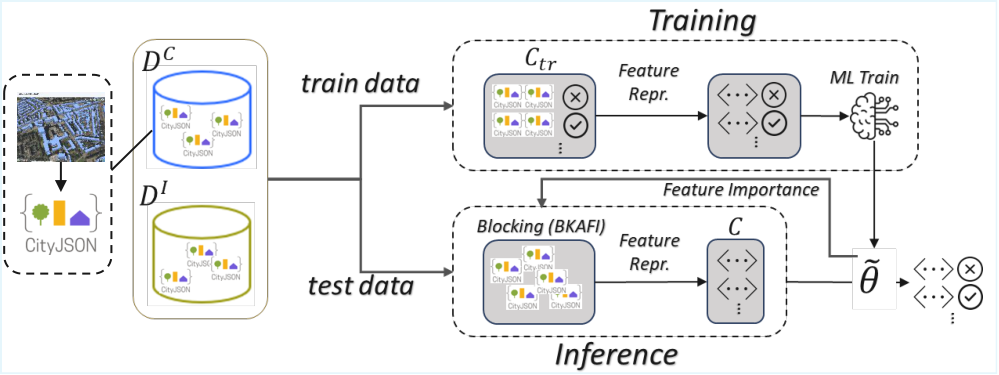
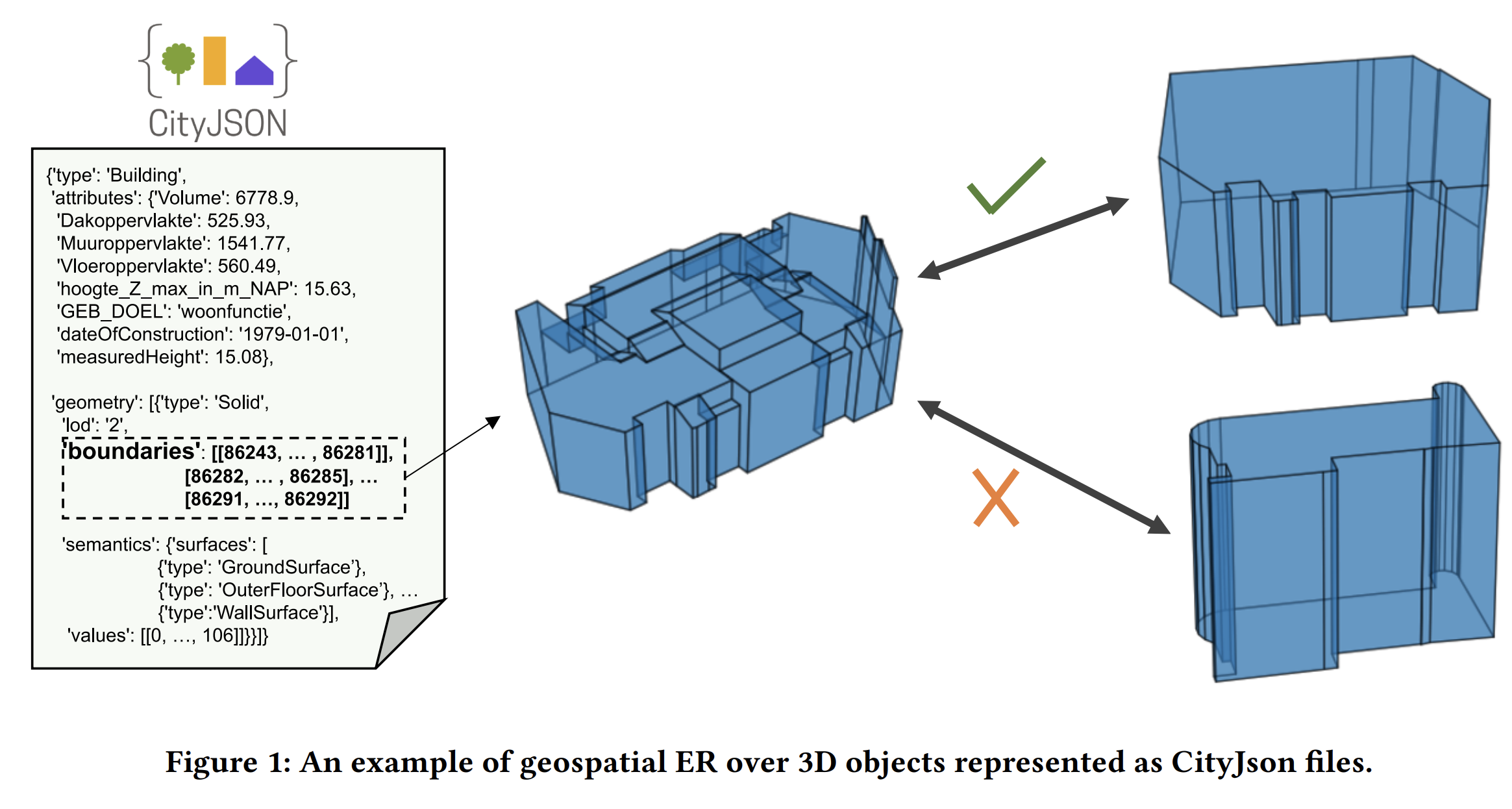
Two city surveys may model the same building independently, with no shared identifiers. The system determines which record in one dataset refers to the same real-world structure in another, relying solely on the geometry of the 3D models.
Works Without GPS or Shared Coordinates
When datasets originate from different sources, they often use incompatible coordinate systems. The pipeline starts by matching buildings purely by their 3D shape, so coordinate misalignment is not an obstacle. The high-confidence shape matches then serve as anchors to recover the rigid transform between the two coordinate frames, after which a spatial nearest-neighbour pass catches additional matches that geometric similarity alone missed.

Reads Full 3D Geometry
Buildings are stored as CityJSON files, a standard format for 3D city models. The pipeline processes the complete 3D surface geometry of each building rather than reducing it to a single point on a map, capturing shape details that a point representation would miss.
Efficient Candidate Shortlisting
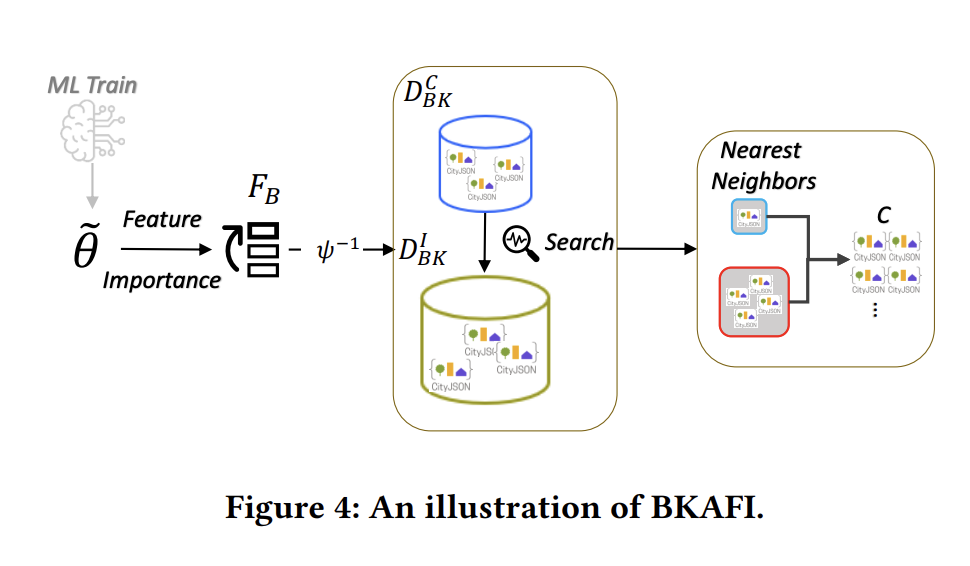
Comparing every building in one dataset against every building in another is not feasible at scale. The blocking step pre-selects a small set of geometrically similar candidates for each building, so the classifier processes only the most probable matches.